
https://arxiv.org/abs/2309.06036
Which Framework is Suitable for Online 3D Multi-Object Tracking for Autonomous Driving with Automotive 4D Imaging Radar?
Online 3D multi-object tracking (MOT) has recently received significant research interests due to the expanding demand of 3D perception in advanced driver assistance systems (ADAS) and autonomous driving (AD). Among the existing 3D MOT frameworks for ADAS
arxiv.org
INTRODUCTION
point object tracking(POT) 3D MOT frameworks는 주로 tracking-by-detection(TBD)를 사용하였다.
반면, extended object tracking(EOT) 3D MOT frameworks는 joint detection and tracking(JDT)를 사용하는데 최근에 연구되고 있다.
POT(point object tracking) - each object only generates at most one measurement per sensor scan
EOT(extended object tracking) - a object can generate multiple measurements per sensor scan
본 논문에서는 TBD-EOT framework를 제안하면서 4D imaging radar dataset(View-of-Delta, TJ4DRadSet)에서 TBD-POT framework, JDT-EOTframework와 비교한다.
이를 통해 TBD방식이 JDT에 비해 적합함을 보인다.
contributions은 다음과 같다.
- povided first benchmark for subsequent studies on 4D imaging radar-based online 3D MOT by comparing POT and EOT frameworks.
- proposed TBD-EOT framework, which leverages the strength of deep learning-based object detector.
- Experiment results indicate that the conventional TBDPOT framework remains preferable for online 3D MOT with 4D imaging radar due to its high tracking performance and computational efficiency. However, the TBD-EOT framework can outperform TBD-POT in certain situations.
METHODOLOGIES
본 논문에서는 3개의 framework를 소개한다.
1. TBD-POT
2. JDT-EOT
3. TBD-EOT

1. TBD-POT
가장 먼저 object detector를 거쳐 3D bounding box를 추출한다(object position, bounding box size, orientation, class, detection score, etc).
그 후, object position measurements를 사용하여 BEV plane에서 MOT를 수행한다.
3D bounding box의 다른 정보들은 estimated position 정보와 함께 3D tracking results를 생성한다.
이 방식의 장점은 두 가지이다.
1) POT algorithm can leverage the extra information such as object class and detection score to further improve tracking performance.
2) POT is typically less compute-intensive compared to EOT.
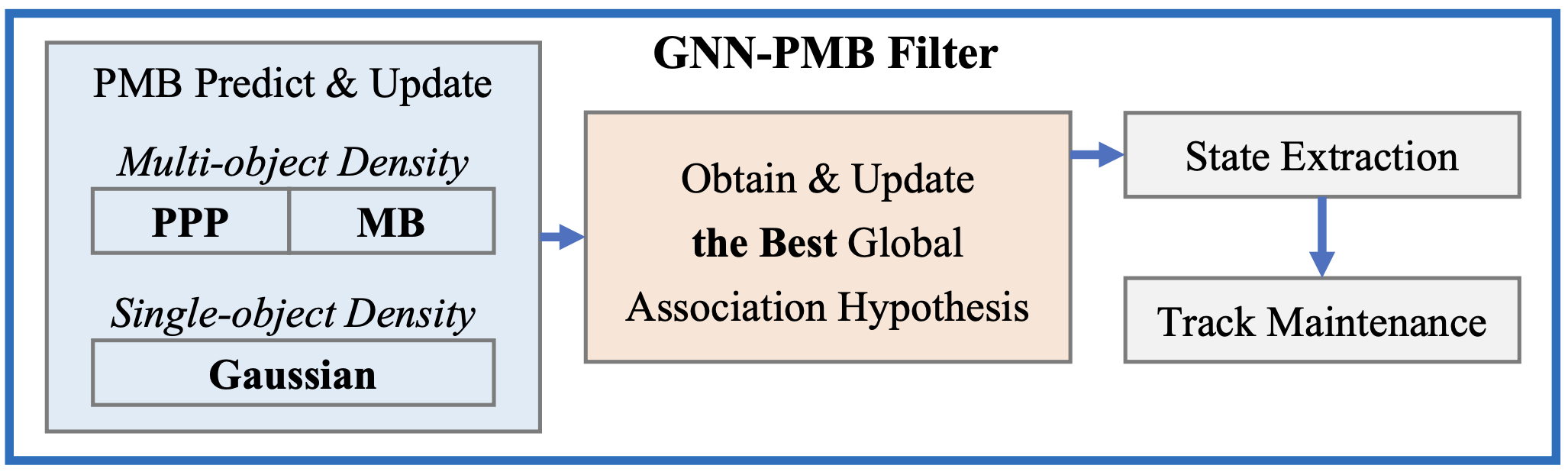
POT알고리즘의 경우 GNN-PMB filter를 사용하였다. 이는 시간에 걸쳐 PMB 밀도를 propagate함으로써 다중 객체 상태를 추정하는 방식으로 undetected object에 대해서는 Poisson point process를, detected object에 대해서는 multi-Bernoulli process를 사용한다.
매 time stamp마다 measurement가 tracklet과 associate되며 여러 개의 local hypothesis가 만들어지고 모여서 global hypothesis가 된다. 이 중 가장 작은 cost를 가지는 hypothesis, 즉 association 조합을 찾는다.
- GNN-PMB
따로 논문 review 예정.
https://arxiv.org/abs/2206.10255
GNN-PMB: A Simple but Effective Online 3D Multi-Object Tracker without Bells and Whistles
Multi-object tracking (MOT) is among crucial applications in modern advanced driver assistance systems (ADAS) and autonomous driving (AD) systems. The global nearest neighbor (GNN) filter, as the earliest random vector-based Bayesian tracking framework, ha
arxiv.org
2. JDT-EOT
point cloud가 clustering process를 거쳐 measurement partition(clusters)을 생성한다. EOT알고리즘은 이 cluster를 사용하여 3D MOT를 수행한다.
point cloud가 pre-process된 3d box보다 많은 정보를 포함하고 있기에 더 정확한 estimation을 할 수 있다는 potential이 있다. 하지만, 정확한 measurement partition을 제작하는 것에 어려움이 있다. 이를 위해 different parameter를 사용하는 DBSCAN, k-means 같은 clustering 알고리즘을 사용하는데 이는 computational complexity를 증가시키고, 실시간성을 떨어트린다.

본 논문에서는 EOT 알고리즘으로 PMBM filter with its Gamma Gaussian inverse Wishart implementation (GGIW-PMBM)를 사용하였다. PMBM filter는 객체 measurement를 multi-Bernulli mixture(MBM) 밀도로 모델링하고 여러 개의 global hypothesis를 전파함으로 레이더 센서 측정값의 높은 불확실성을 처리한다.
각 객체는 역 위샤트 (IW) 밀도로 표현되는 타원 모양을 가지며, 타원의 장축과 단축축을 사용하여 직사각형 경계 상자를 형성.
- PMBM
따로 논문 review 예정
Poisson Multi-Bernoulli Mixture Conjugate Prior for Multiple Extended Target Filtering
This paper presents a Poisson multi-Bernoulli mixture (PMBM) conjugate prior for multiple extended object filtering. A Poisson point process is used to describe the existence of yet undetected targets, while a multi-Bernoulli mixture describes the distribu
ieeexplore.ieee.org
3. TBD-EOT
검출된 3D bounding box 내의 point들을 measurement로 선택한다. JDT-EOT와 비교하여 TBD-EOT방식은 두 가지 장점을 가진다.
1) 계산 복잡성 감소
2) EOT 알고리즘은 탐지기에서 얻은 정보를 활용하여 추적 성능을 더욱 향상 가능
EXPERIMENTS AND ANALYSIS

'Paper > Prediction and Tracking' 카테고리의 다른 글
| ByteTrack: Multi-Object Tracking by Associating Every Detection Box (0) | 2023.11.27 |
|---|---|
| TransTrack: Multiple Object Tracking with Transformer (0) | 2023.11.27 |
| Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (1) | 2023.11.06 |
| Towards Real-Time Multi Object Tracking (1) | 2023.10.25 |
| SimpleTrack: Understanding and Rethinking 3D Multi-object Tracking (0) | 2023.09.07 |